
Project 2: Creating Maze Simulation with ROS and Gazebo for Turtlebot3
This project is a continuation of the first project, but significantly different. In this work you will learn how to build a tailor designed world, and spawn a turtlebot inside the world. You will also learn how to record waypoints along a trajectory which you wish your robot will follow, then program a python script to drive the robot walking through the points.
You will have the opportunity to review the works you have done in Project 1, when you do this project. You will have a homework assigned after this session to basically repeat this work you will do in this session, but create a new world of your own. So, make sure you understand this piece of work in order to facilitate your home works.
After this session, you will know how to
1. Build a new world of your design
2. Record waypoints and program to drive your robot to follow these points in your new world
3. Enhance your understanding of SLAM
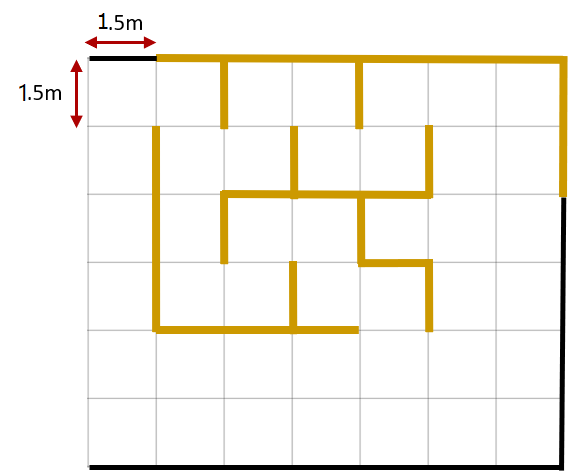
Please follow this tutorial to do the project - download the tutorial here, download map here.
{kind=link}
You can watch the video related to this project by clicking HERE.
You can try the following two exercises after this workshop.
1. Another example similar to our project
2. ROS and OpenCV: Tutorial, and code
| Visitor Counter: | |||||||
 | |  |  |  |  | ||